RTLS Technology Comparison
Indoor Tracking Technologies Comparison
There are many technologies capable of indoor positioning out there. Each of them has its own advantages and disadvantages regarding accuracy, price, scalability signal coverage and so on. It is always up to the customer to decide what kind of performance is he expecting from the location system. While traditional technologies like Wi-Fi, Bluetooth and Active RFID can bring accuracy up to several meters, Ultra Wideband is more suitable for applications where the positioning accuracy is a critical parameter.
RSSI vs Time of Flight Distance Estimation
Generally, there are two ways to measure distances between two devices. The first is based on RSSI, or Received Signal Strength Indication. We know that the signal strength drops with increasing distance from the transmitter in a deterministic fashion that is based on theoretic formulas. With this assumption, we can estimate the distance between a receiver and transmitter. However, this approach has several disadvantages. Since the environment and thus the radio channel changes constantly, then so does the RSSI parameter, which in turn brings inaccuracy to the system. The RSSI parameter can be also degraded by multipath propagation and other phenomenons that are quite common for the radio channel. The results and the overall accuracy can be increased by a process called fingerprinting, however due to rapidly changing radio environments, this process would need to be done frequently to improve the ranging results. Traditional technologies like Wi-Fi, Bluetooth, Bluetooth Low Energy and Active RFID are based on this distance estimation process.
Another option is to use the signal’s Time of Flight rather than RSSI. This yields much more accurate results in Line of Sight environments and can lead up to a centimeter level accuracy depending on the frequency and nature of the signal. This is an approach that is used by the Ultra Wideband technology. By combining the Time of Flight measurements from several devices, we can obtain an accurate position with precision of up to several centimeters. The nature of UWB signals makes it an ideal candidate for utilizing the Time of Flight distance estimation process. The performance might be degraded for example by obscuring the Line of Sight between UWB devices, however the overall accuracy is still superior in comparison to RSSI.
Real Time Location System (RTLS) Technology Comparison
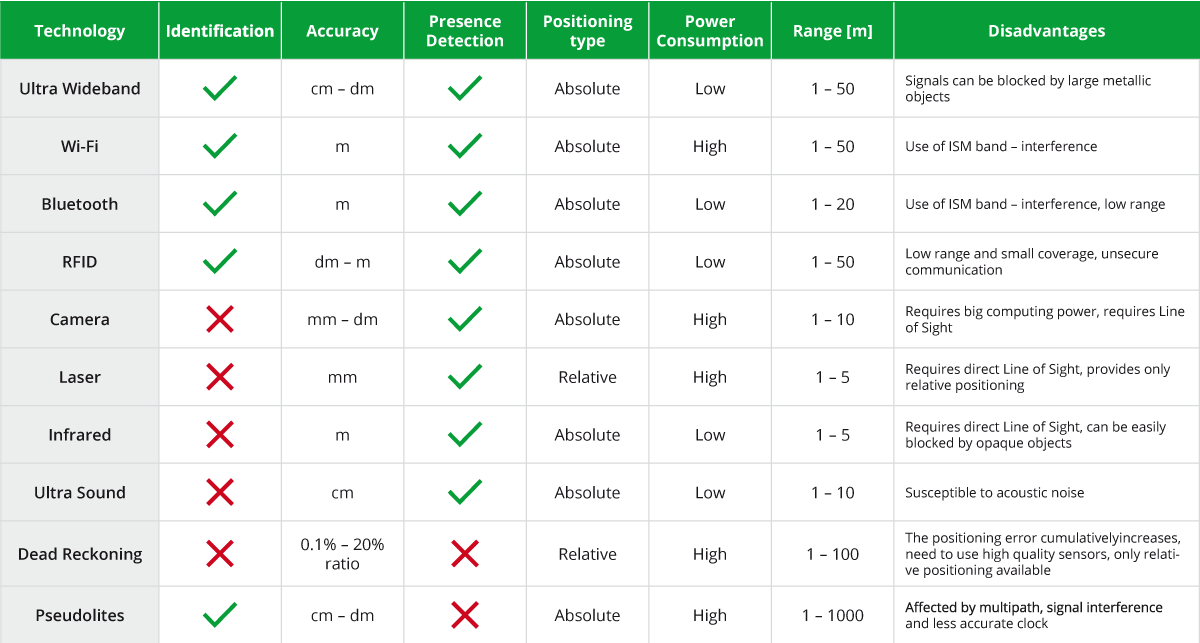
From the table it is clear that each positioning technology has its drawbacks. It is up to the customer to decide which kind of positioning technology is the most suitable for his application or use case. While having some limitations of its own, Ultra Wideband technology provides superior positioning accuracy that can be quite useful in several business verticals.